|
3D-Drucker OliCube MK3 (Eigenentwicklung/Eigenbau) |
|
Beschreibung:
Hier der Nachfolger von meinen selbst gebastelten
3D-Druckern "OliBot MK1" und "OliCube MK2".
Dies Version genannt "OliCube MK3" ist quasi eine Syntese aus den ersten beiden
Druckern, wobei ich gut 80% der Teile aus aus dem OliCube MK2-Projekt wieder
verwenden konnte. Bei diesem Modell führt nun der Druckkopf die X-/Y-Bewegung
aus und das Bett wird in der Z-Achse nach unten bewegt.
(Um die Grafiken klarer und detaillierter zu
sehen, solltet Ihr einen Klick mit der linken Maustaste
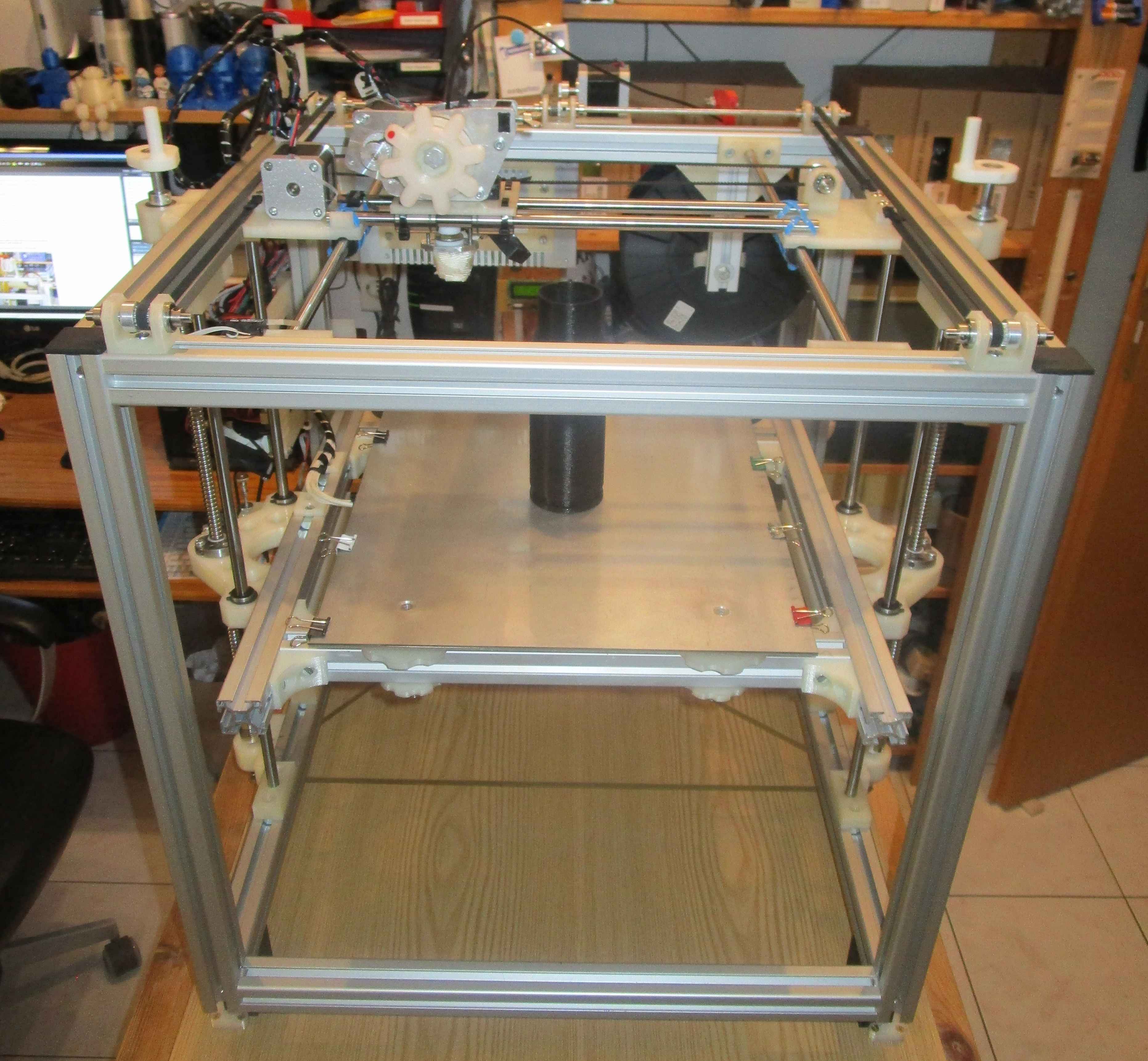
Hier vorab ein Bild meines fertigen Eigenbau-3D-Druckers "OliCube MK3":
Allgemein: Hier habe ich wieder die Idee
aufgegriffen, dass der Kopf die X-/Y-Bewegung machen soll und das Bett nur die
Z-Bewegung. Vorteil: Kopf bleibt immer in einer Höhe, Filamentzuführung findet
immer in der gleichen Höhe statt und das Druckobjekt wird nicht hin- und
herbewegt, sondern nur pro Layer abgesenkt. Von dem Prusa-Konzept des OliCube
MK2 hatte ich mir mehr versprochen, deshalb hier dier Bau des Nachfolgemodells. Allerdings habe ich statt 2 Motoren für die Z-Spindeln
auch hier den Antrieb über einen
Zahnriemen gelöst. Dies hat meines Erachtens den Vorteil, dass bei einem
Schrittverlust eines Motors die Z-Achse nicht verkantet und selbst wenn ich an
einer Spindel manuell drehe, sich die 2. Spindel absolut parallel mitbewegt. Im Moment habe ich einen alten K8200-Extruder (basierend auf einem Wade-Extruder)
aus meinem Ersatzteilfundus für den K8200 montiert. Es ist aber, durch eine universelle Adapterplatte, möglich jeden
anderen Extruder zu montieren. Auch die Montage eines "Bowden-Extruders" oder
eines "Dual-Extruders" bzw. "Multi-Extruders" sollte kein Problem sein. Für einen Dual-Extruder
oder Multi-Extruder müsste
allerdings eine andere Elektronik montiert werden, die mindestens 2 Extruder
ansteuern kann. Dies ist mit der momentan benutzen 3DRag-Elektronik (Sanguinololu-kompatibel)
so nicht möglich. Hier wäre dann z. B. eine Arduino-Mega-2560-Elektronik mit
RAMPS 1.4 notwendig.
Der Druckbereich des Druckers ist wie
folgt: X = 200mm; Y = 350mm; Z = 330mm
Durch diesen Eigenbau (und auch
durch den OliBot MK1+ OliCube MK2) habe ich
sehr viel
|