|
3D-Drucker OliBot MK1 (Eigenentwicklung/Eigenbau) |
|
Beschreibung: Hier berichte ich über die Entwicklung und den Aufbau eines eigenen 3D-Druckers. Die blauen Kunststoffteile habe ich alle komplett in OpenSCAD entwickelt und dann mit meinem 3D-Drucker K8200 (Bausatz von Velleman) hergestellt. Der Rest war gute, alte Handarbeit, Montage, Justage, Lötarbeit und Anpassung der Open-Source 3D-Drucker-Firmware von Erik-Zalm, names Marlin, an die Parameter dieses Druckers. Die Firmware habe ich stark an die Einstellungen meines K8200-Drucker angelehnt und auch entsprechende Anpassungen von begeisterten Usern aus dem freien K8200-Forum der RepRap-Community entnommen. Mein Dank an dieser Stelle an Boris Landoni für die super Entwicklung des K8200/3DRag-Druckerbausatzes, Erik-Zalm für die Marlin-Firmware, und den Usern und Forumsbetreibern von RepRap.org mit der speziellen Unterabteilung für den K8200. Einen weiteren Dank an die Leute, die kostenlose Software zum Konstruieren von Teilen (OpenSCAD), Slicen (Slic3r) und Drucken (Repetier-Host, Cura) interessierten Personen zur Verfügung stellen. Mein Dank gilt auch der Fa. Schrauben-Jäger in Willstätt-Sand/H. Johannes Gasteiger die/der mich hier kostenlos mit den Normteilen zur Verschraubung der Teile versorgt hat.
(Um die Grafiken klarer und detaillierter zu
sehen, solltet Ihr einen Klick mit der linken Maustaste
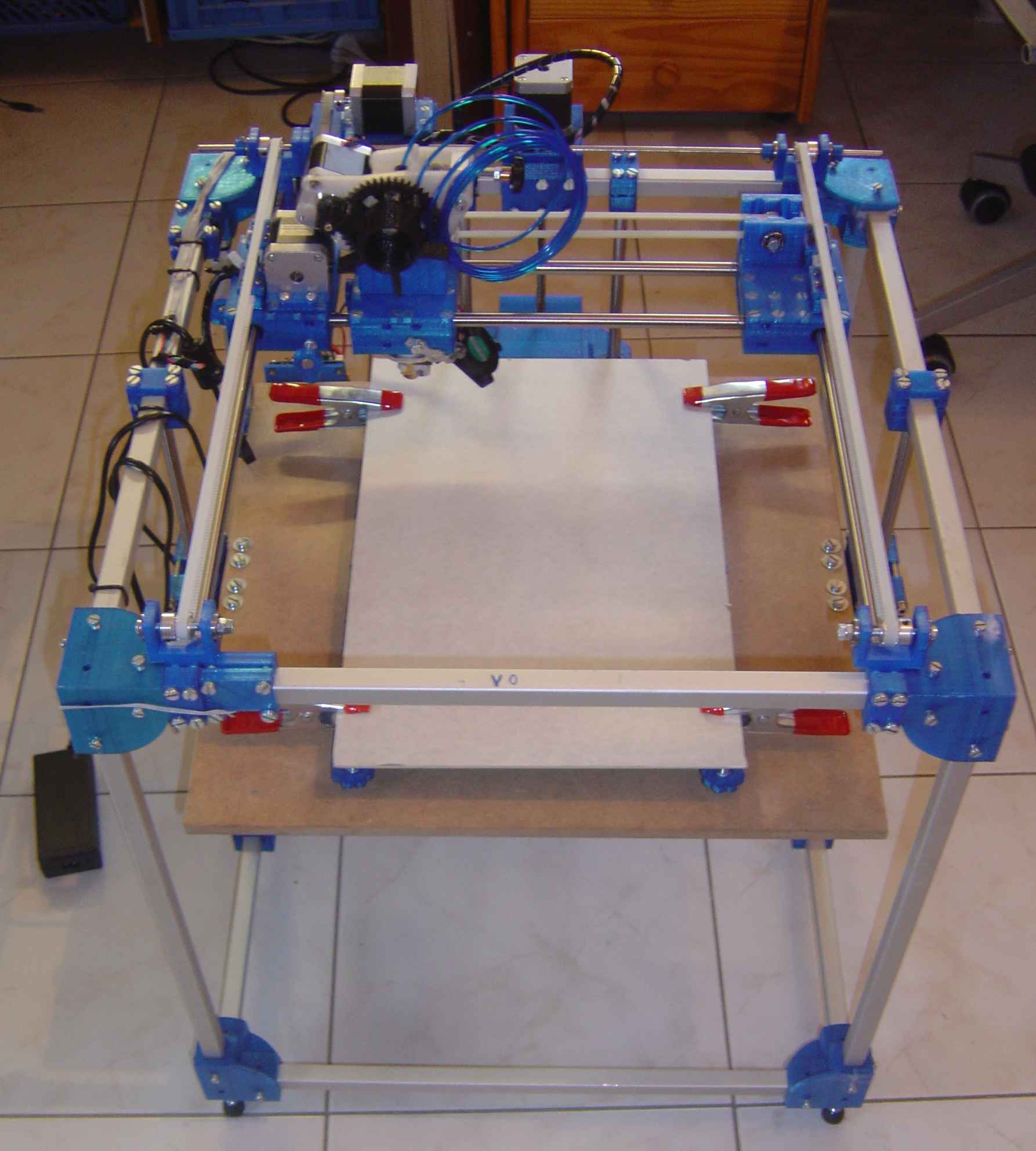
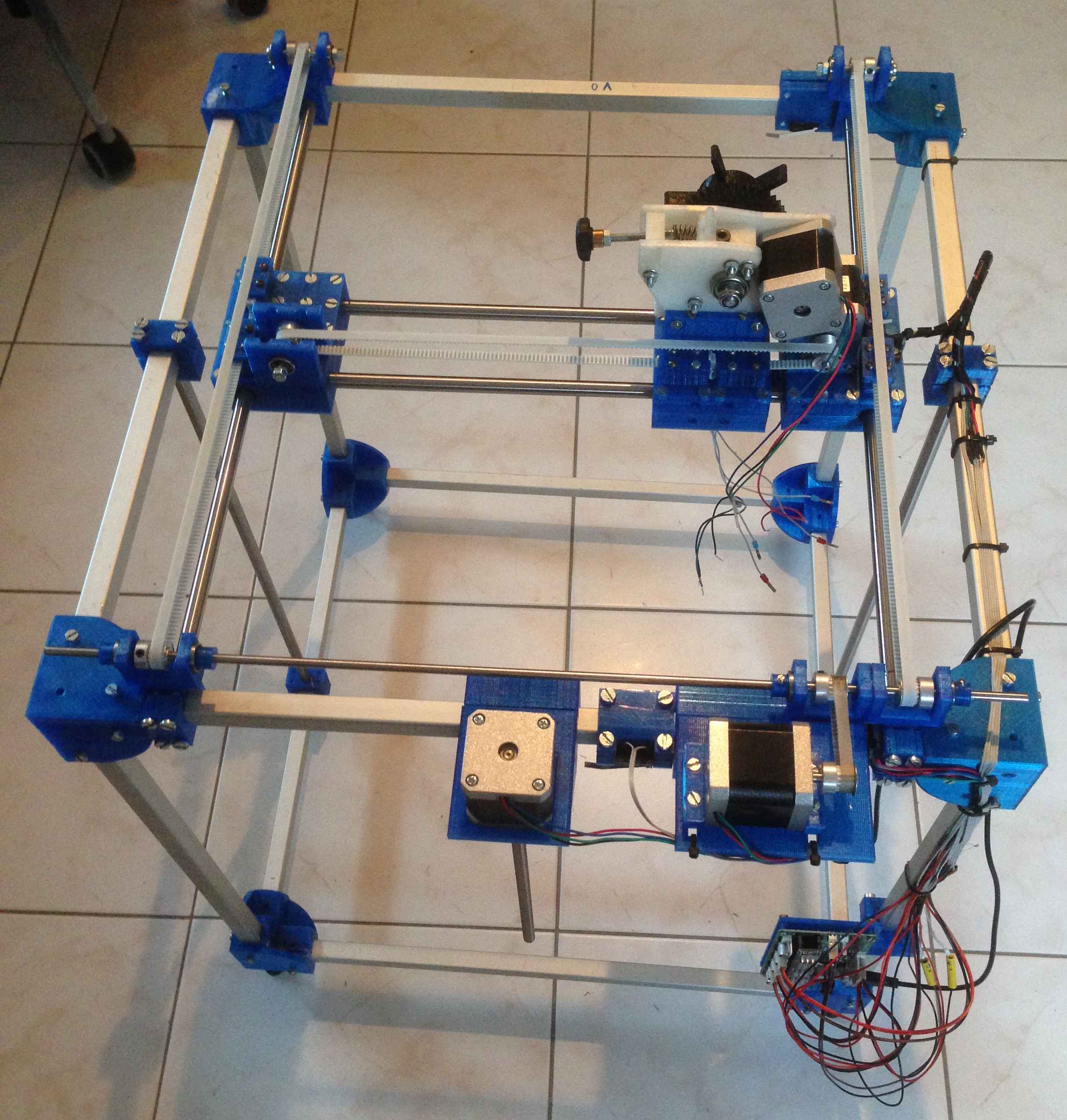
Hier ein Bild meines
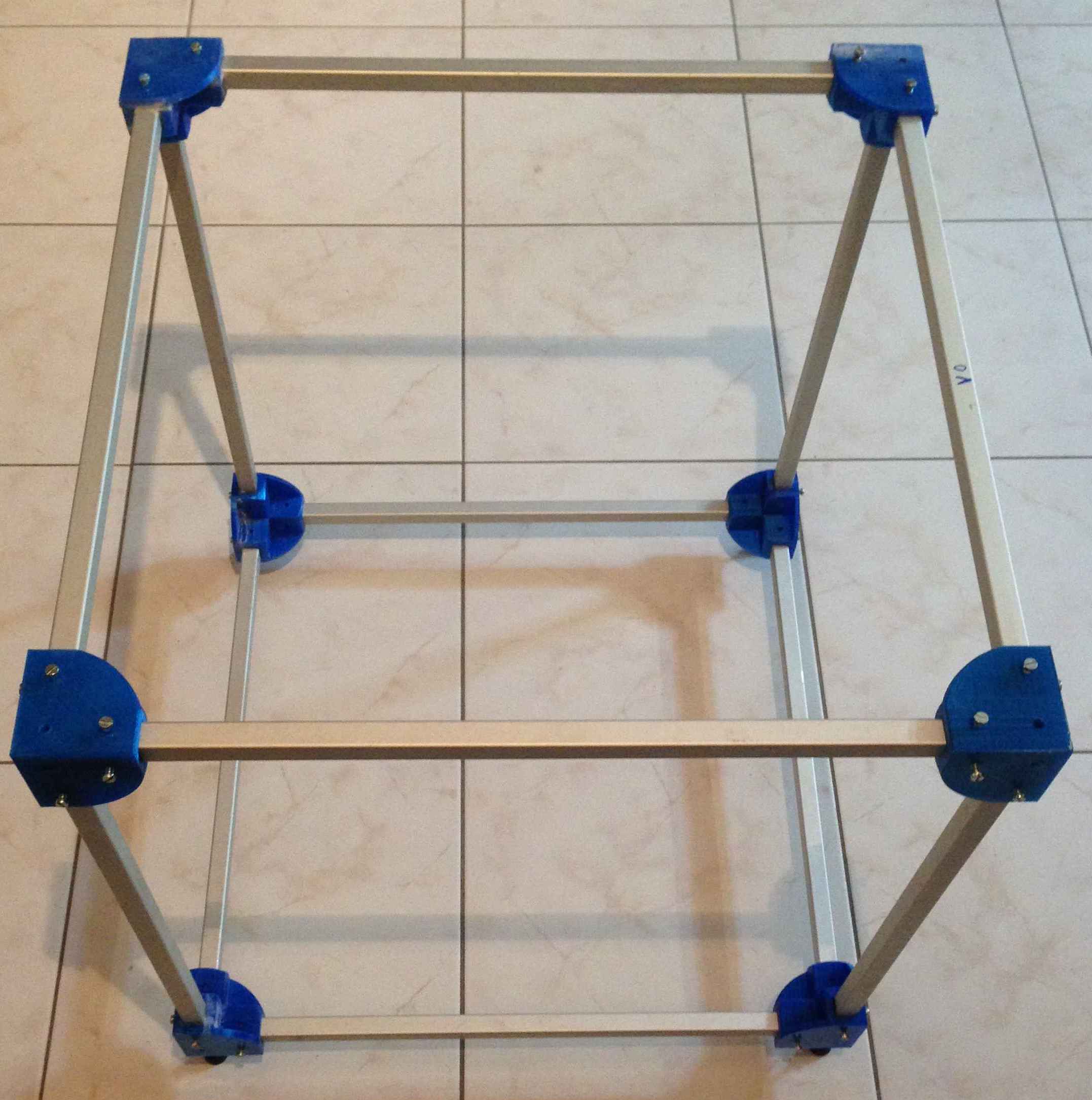
fertigen Eigenbau-3D-Druckers "OliBot MK1": Allgemein: Meine Idee war hier, mit Hilfe meines 3D-Druckers K8200, einen komplett eigenen 3D-Drucker zu entwerfen und zu bauen. Mir war hier wichtig, dass sich der Druckkopf/Extruder in X- und Y-Richtung bewegt und das Druckbett die Bewegung in Z-Richtung macht. Beim K8200 bewegt sich ja das Druckbett in X-/Y-Richtung und der Kopf übernimmt die Z-Bewegung. Das hat zur Folge dass bei größeren Druckobjekten die Masse auf dem Druckbett zunimmt und mitbewegt werden muss, was nicht immer ideal ist. Bei meinem Konzept bewegt sich der Druckkopf mit einer gleich bleibenden Masse und das Bett fährt Lage für Lage nach unten, wobei das Druckobjekt pro Lage nur recht wenig in die Z-Richtung bewegt wird. Weiter war mein Anliegen Teile und Rohmaterialien zu verbauen, was hier bei uns im Hause bzw. in der Werkstatt meines Schwiegervaters vorrätig war. Z. B. das Alurohr 15x15mm welches ich für den Rahmenaufbau benutzt habe. Hier nun die Entstehung bzw. der Baufortschritt meines Projektes "OliBot MK1": Angefangen hat alles mit einem Eckverbinder für die Alurohre:
Daraus habe ich mit 12 Alurohrstücken und 8 dieser Verbinder ein Rahmengestell gebaut:
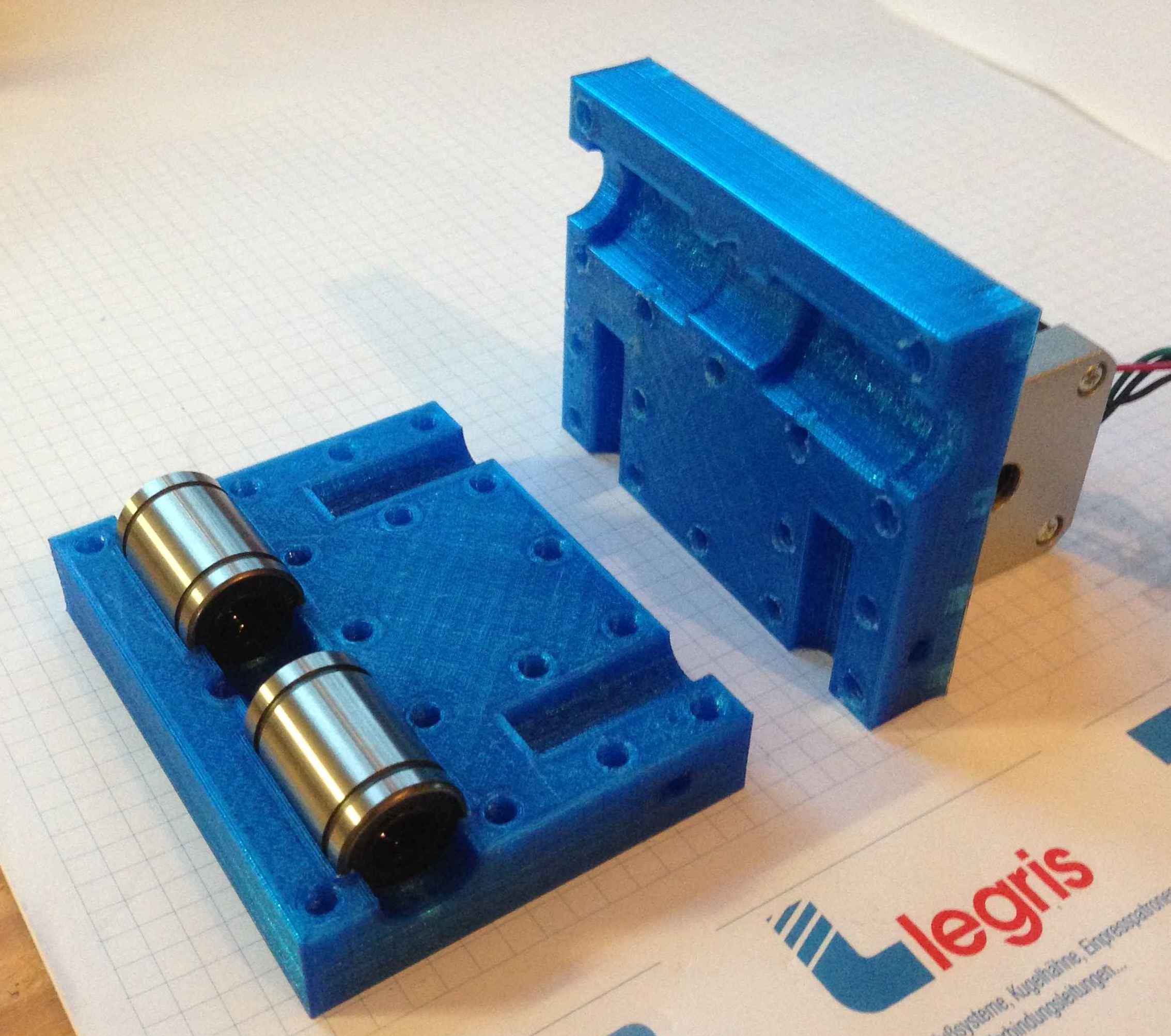
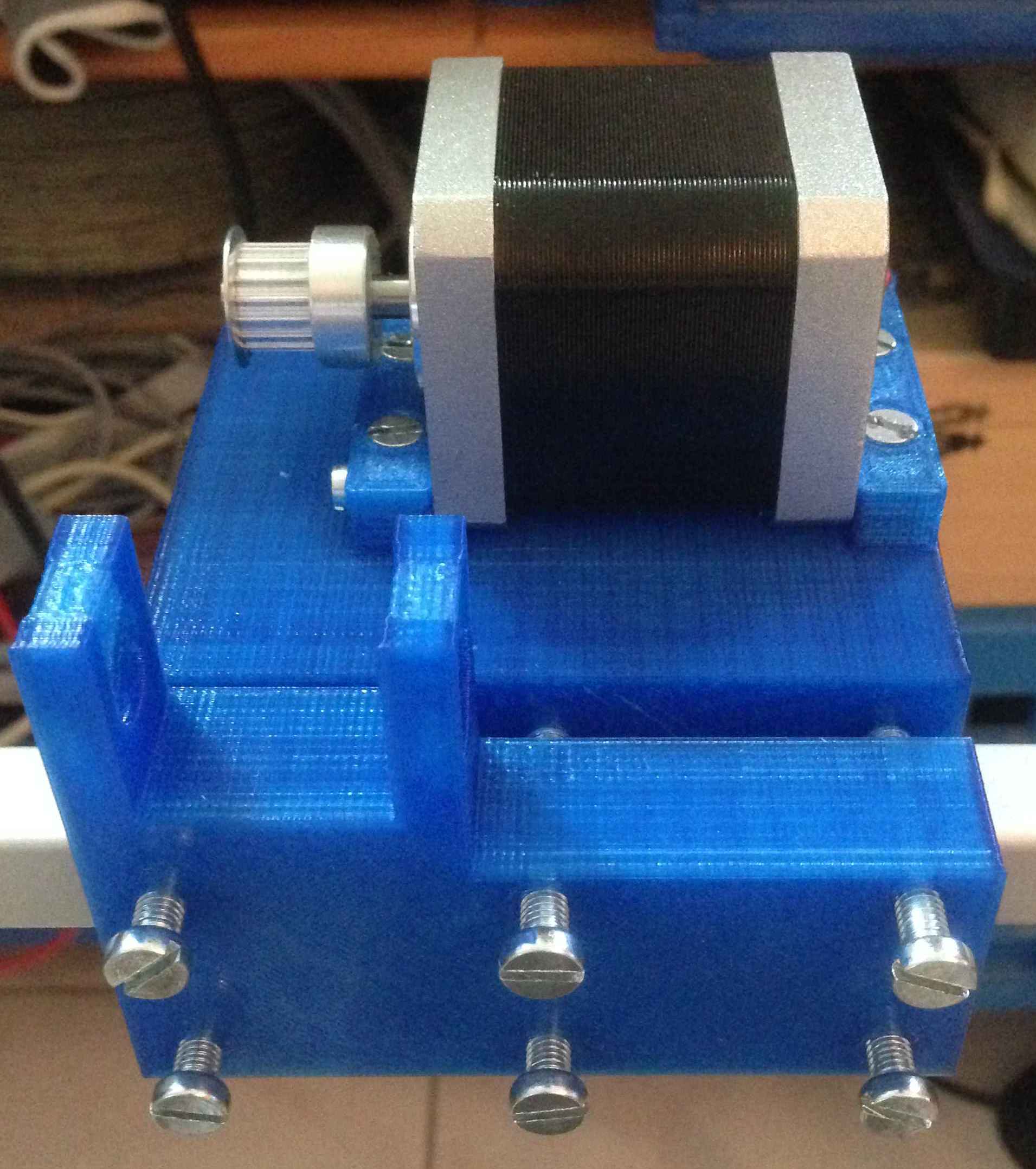
Anschließend habe ich in OpenSCAD einige Anbauteile, wie z. B. Klemmteile für die Achsen von Kugelbüchsen, Aufhängungen von Motoren und Elektronik, Klemmteile für Zahnriemen, usw. entworfen. Auch den Extruder habe ich in Anlehnung an den Extruder vom K8200 aus Kunststoffteilen gedruckt und das Hotend entsprechend modifiziert um das auf meinem Drucker einsetzen zu können. Hier der linke Schlitten für die X-Bewegung mit eingelegten Kugelbüchsen und Antriebs-Stepper:
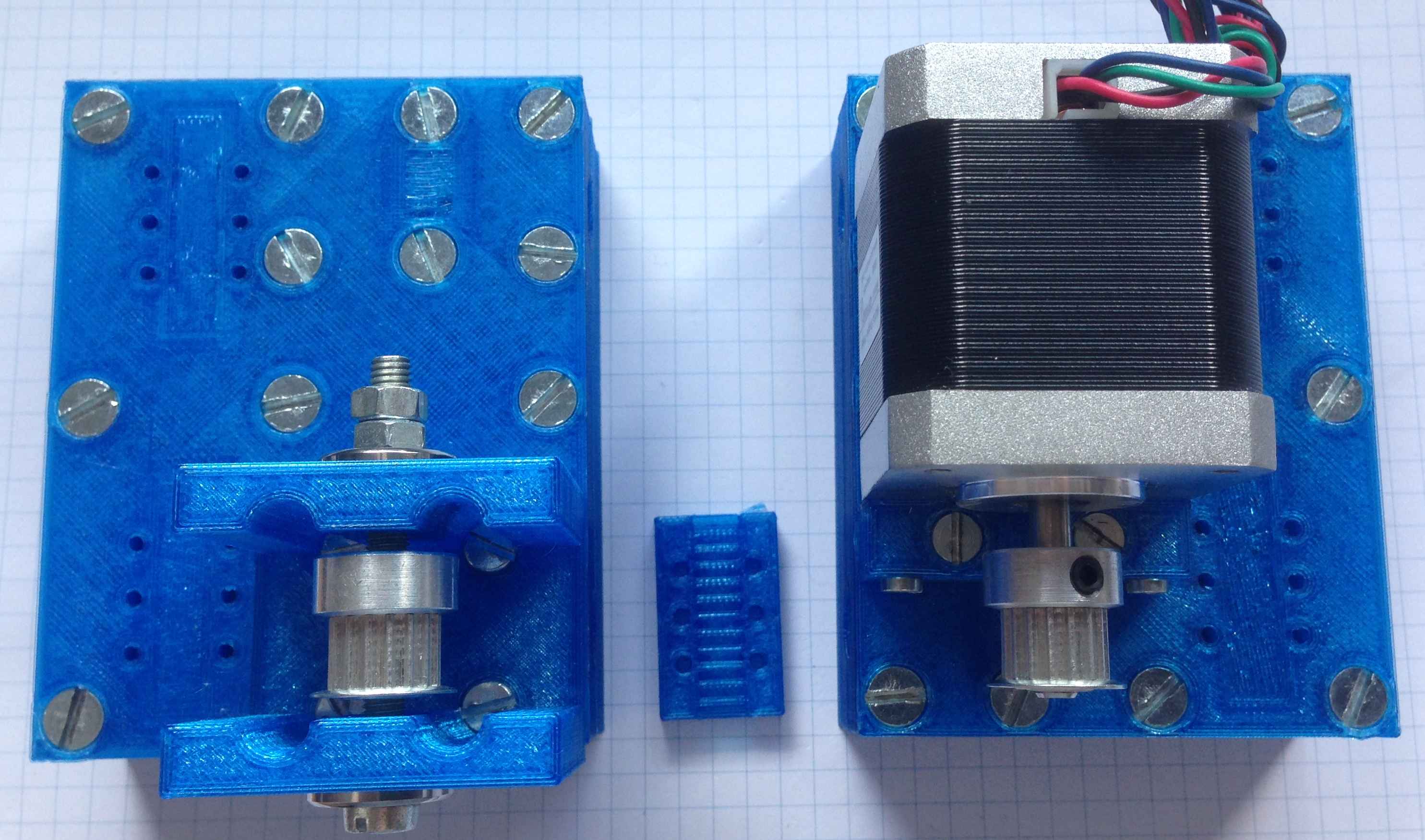
Die komplette X-Achse mit Umlenkung, Lagerung, Zahnscheiben und Zahnriemen-Klemmung:
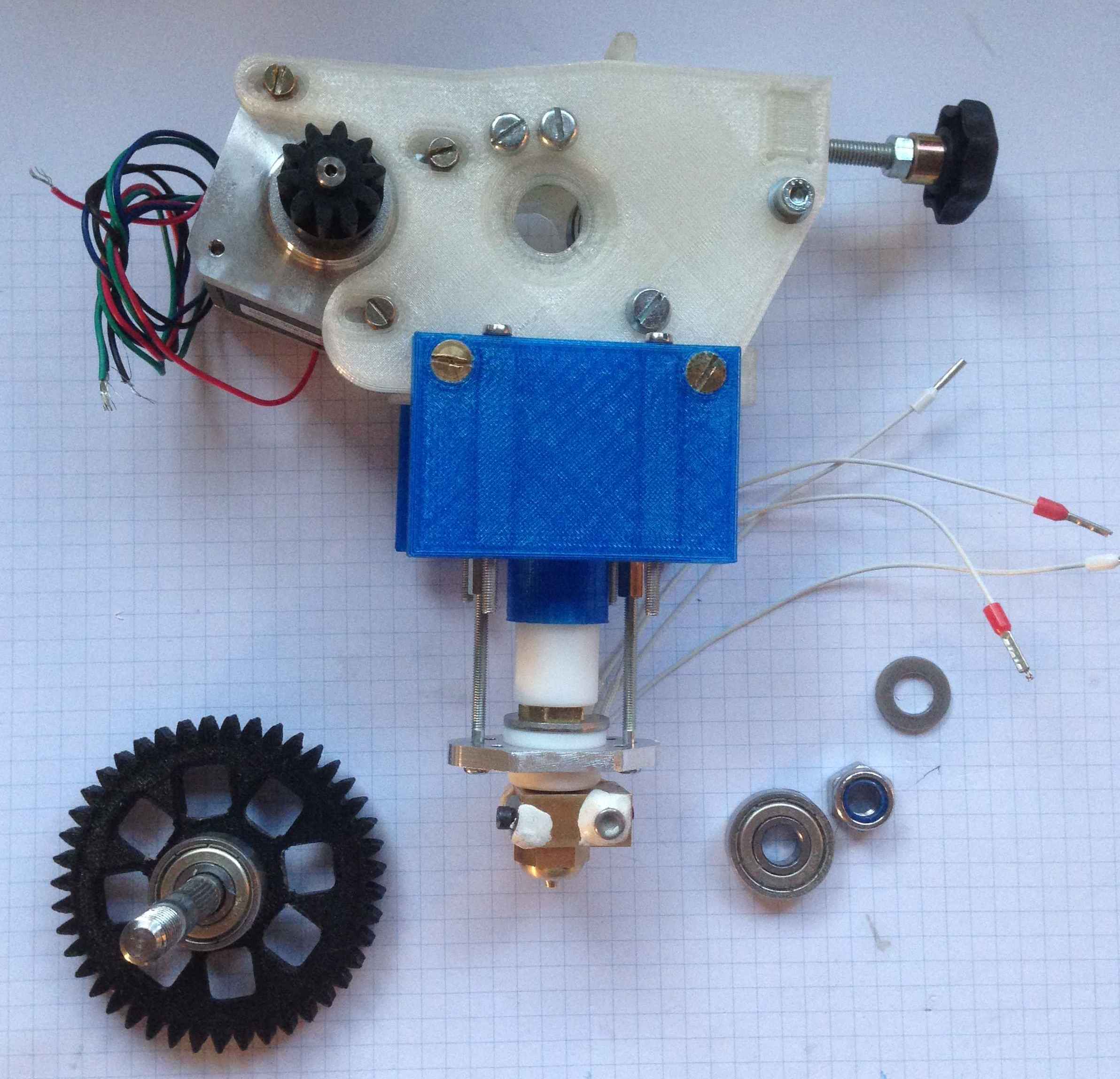
Die Y-Achse wird über einen zentralen Motor am Rahmen angetrieben:
Hier der komplette
Antriebsaufbau für X- und Y-Achse
Hier ein Bild des K8200/3D-Rag-Extruders den ich
(bis auf das Hotend) weitestgehend
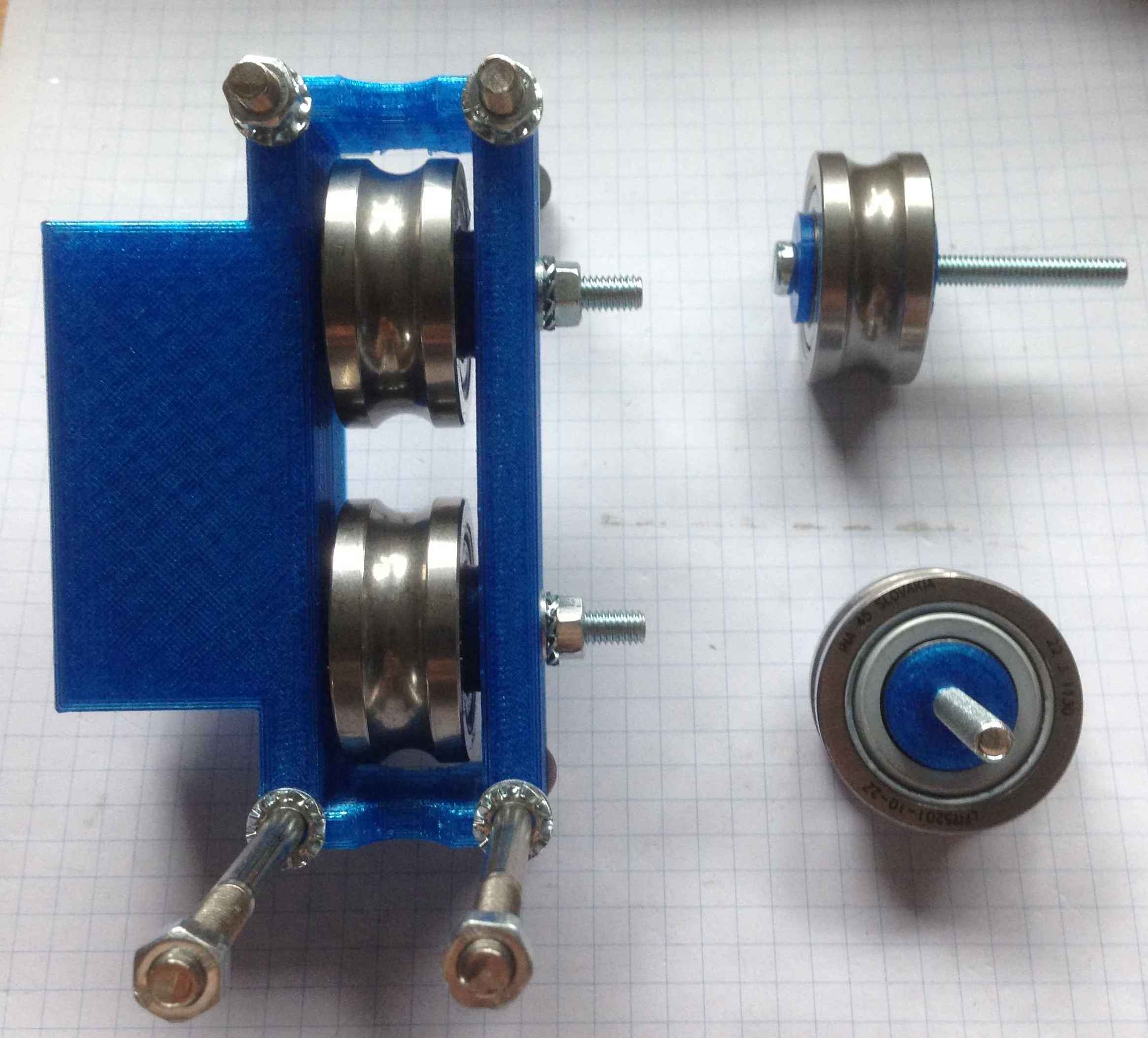
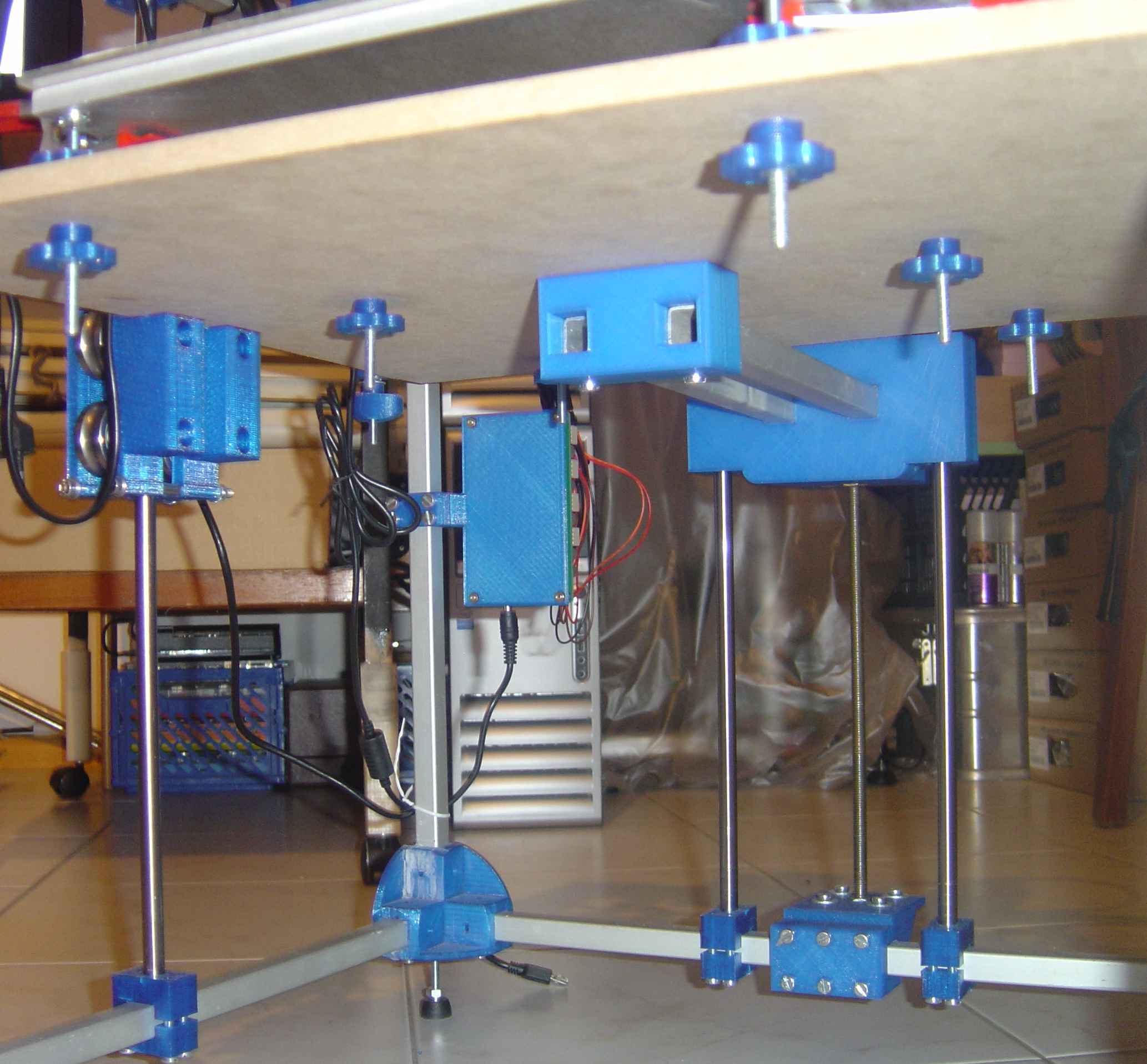
Für die Z-Bewegung bzw. die Druckbettlagerung
habe ich INA LFR-Laufrollen in einem Käfig
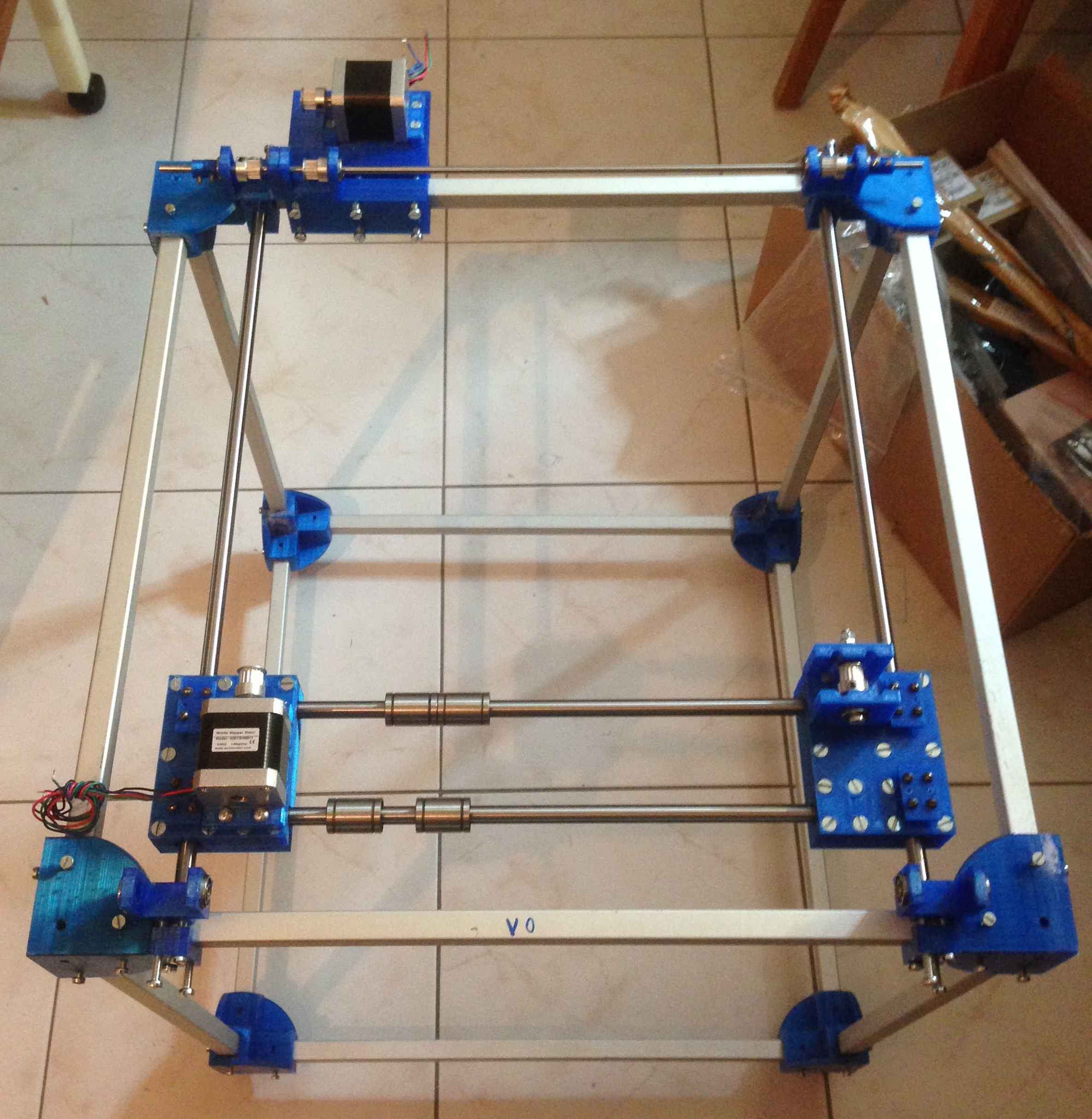
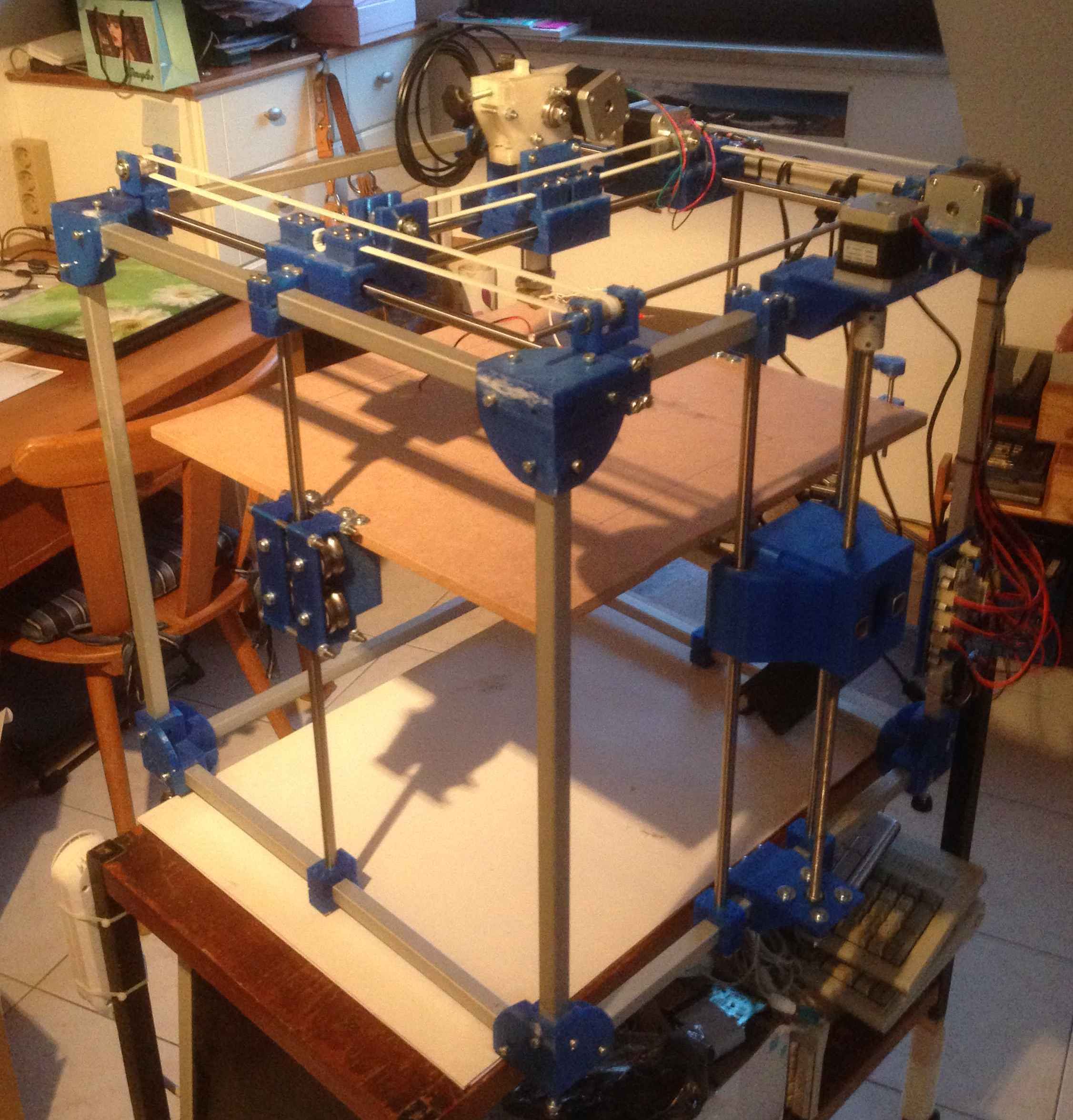
Hier der fertig montierte Rahmen (mit Antrieben X/Y/Z, dem Extruder und der Steuerungselektronik:
Hier der (fast) fertige Drucker (ohne Druckbett, Extruder noch nicht angeschlossen):
Hier noch ein Blick unter den Drucker auf die Z-Achse:
Um den Drucker zu komplettieren habe ich mir eine Aluplatte von einem Wasserstrahlschneider zuschneiden lassen und höhenverstellbar/justierbar auf der braunen MDF-Platte für das Druckbett verschraubt. Anschließend habe ich darauf eine mit Oracal-Transferpapier beklebte Glasplatte mit Klemmen befestigt und dann das ganze Bett zum Druckkopf ausgerichtet. Das fertige Ergebnis/der fertige Drucker ist auf dem ersten Bild ganz am Anfang zu sehen. Auf Bilder von den einzelnen Kleinteilen (z. B. Umlenkungen Riemen, Halterungen Linearführungen, Endschalterhalter, etc.) habe ich bewusst verzichtet um diese Webseite einigermaßen übersichtlich zu halten.
Hier seht Ihr die generellen Teile für für diesen
Drucker, die ich mit OpenSCAD erzeugt habe
Der Druckbereich des Druckers ist wie
folgt: X = 200mm; Y = 320mm, Z = 260mm (Video "OliBot MK1 - erster Funktionstest" - WMV-Format: 4,7 MB)
Die von mir erstellten OpenSCAD-Dateien gebe ich
gerne, im Rahmen des "Open-Source-Gedankens", Ich hoffe dass reicht Euch als kleine Einführung in den Eigenbau eines 3D-Druckers.
Durch diesen Eigenbau habe ich
sehr viel über das Thema "3D-Drucker" dazugelernt.
|