|
Beschreibung:
Mit dieser Seite soll gezeigt werden, wie man mit
der Programmiersprache "Bascom" (ein
Basic-Dialekt speziell zur Programmierung von MicroControllern) von der Firma
MCS-Elektronik einen MicroController von Atmel (in diesem Fall habe ich einen
ATMega32 genommen; hatte ich einfach noch vom AVR-NET-IO übrig!) programmiert. Die Fa. MCS-Electronik bietet eine kostenlose
Demoversion von "Bascom für AVR" zum Download auf Ihrer Webseite (http://www.mcselec.com)
an. Mit dieser Demoversion können hier immerhin 4 KB große Programme geschrieben
werden und die Demo eignet sich gut um mal ohne große Investition den Einstieg
zu finden.
Als Programmierhardware habe ich mir schon vor einer
Weile von der
Fa. Pollin das Atmel-Evalutations-Board
Version 2.0.1 zugelegt. Bisher habe ich dieses Board zum Programmieren von
ATMega8, ATTiny2313, ATMega32, ATMega644 benutzt. Hauptsächlich die
Firmwarefiles von Pollin für das AVR-NET-IO-Board
und auch von E2000-Projekten habe ich mit
diesem Board auf die entsprechenden Atmel-Bausteine geschrieben. Falls Ihr so
ein Board nicht kaufen wollt, könnt ich auch das AVR-NET-IO-Board von Pollin als
kleine Experimentierhardware hernehmen. Das Evaluationsboard hat z. B. 3 Taster,
2 LEDs und einen Summer eingebaut. Mit diesen Schaltern und Anzeigen kann man
wunderbar Programmfunktionen ausprobieren, ohne weitere Hardware zu kaufen. Ich
habe mir hier allerdings über einen Portadapter alle Pins des
ATMega32-Controllers auf ein Steckbrett rausgelegt. So kann ich nach Herzenslust
LEDs, Schalter, Sensoren und Aktoren für Tests anschließen.
Nach den "Spielereien" mit dem AVR-NET-IO-Board und
der alternativen E2000-Firmware für dieses Board, was lag nun näher als sich mit der Erzeugung einer
eigenen kleinen Firmware für einen MicroController zu beschäftigen, anstatt hier immer auf vorgefertigte Lösungen
zurückzugreifen? Abgesehen davon lernt man bei der eigenen Programmierung auch die
Funktionsweise der Atmel-MicroController klarer und verständlicher kennen.
Das Evaluations-Board wird mit einem einfachen 9V-Netzteil betrieben,
welches ich noch in der Bastelkiste hatte. Dieses Board kann man bei Fa. Pollin
entweder fertig aufgebaut (Best-Nr. 810 074) oder als Bausatz (Best.-Nr. 810
038) bekommen. An dieses Board habe ich dann über über einen 40poligen
Flachbandleiter einen Adapter-Bausatz für Punktraster/Lochraster für dieses
Board (Best.-Nr. 810 057) und ein Laborsteckbrett zum Experimentieren
angeschlossen. Dort kann ich dann meine Testschaltungen mit LEDs zur Anzeige von
Ausgängen oder Schaltern zum Einstellen von Werten für Eingänge
anschließen/aufbauen.
Des Weiteren benötigt man ein serielles
Verbindungskabel um eine Datenaustauschverbindung vom Controller zum Rechner
herzustellen. Die Anpassung der MicroController-Logik an die Computerlogik wird
auf dem Board von einem Baustein mit der Bezeichnung "MAX232" übernommen. Auch dieses
Verbindungskabel gibt es bei Fa. Pollin (Best.-Nr. 720 738). Um über
den integrierten seriellen Programmer des Atmel-Evalutationsboards den Controller zu
programmieren benötigt man ein zweites solches Kabel (oder man muss ständig
umstecken). Da diese
Programmierverbindung allerdings recht langsam ist, habe ich meinen bereits
vorhandenen Parallel-Port-ISP-Programmer (mit welchem ich bisher auch das AVR-NET-IO von
Pollin über den ISP-Port programmiert habe) an das Atmel-Evaluationsboard
angeschlossen. Auch einen USB-Programmer habe ich schon an das Board problemlos
angeschlossen. Generell kann an das Board kann jeder ISP-Programmer mit
10poligem Stecker oder auch ein JTAG-Programmer angeschlossen werden. Auch mein
"Selbstbaukabel" zur ISP-Programmierung von
Atmel-MicroControllern kann hier ohne Probleme angeschlossen und genutzt
werden.
(Um die Grafiken klarer und detaillierter zu
sehen, solltet Ihr einen Klick mit der linken Maustaste
auf der entsprechenden Grafik ausführen!)
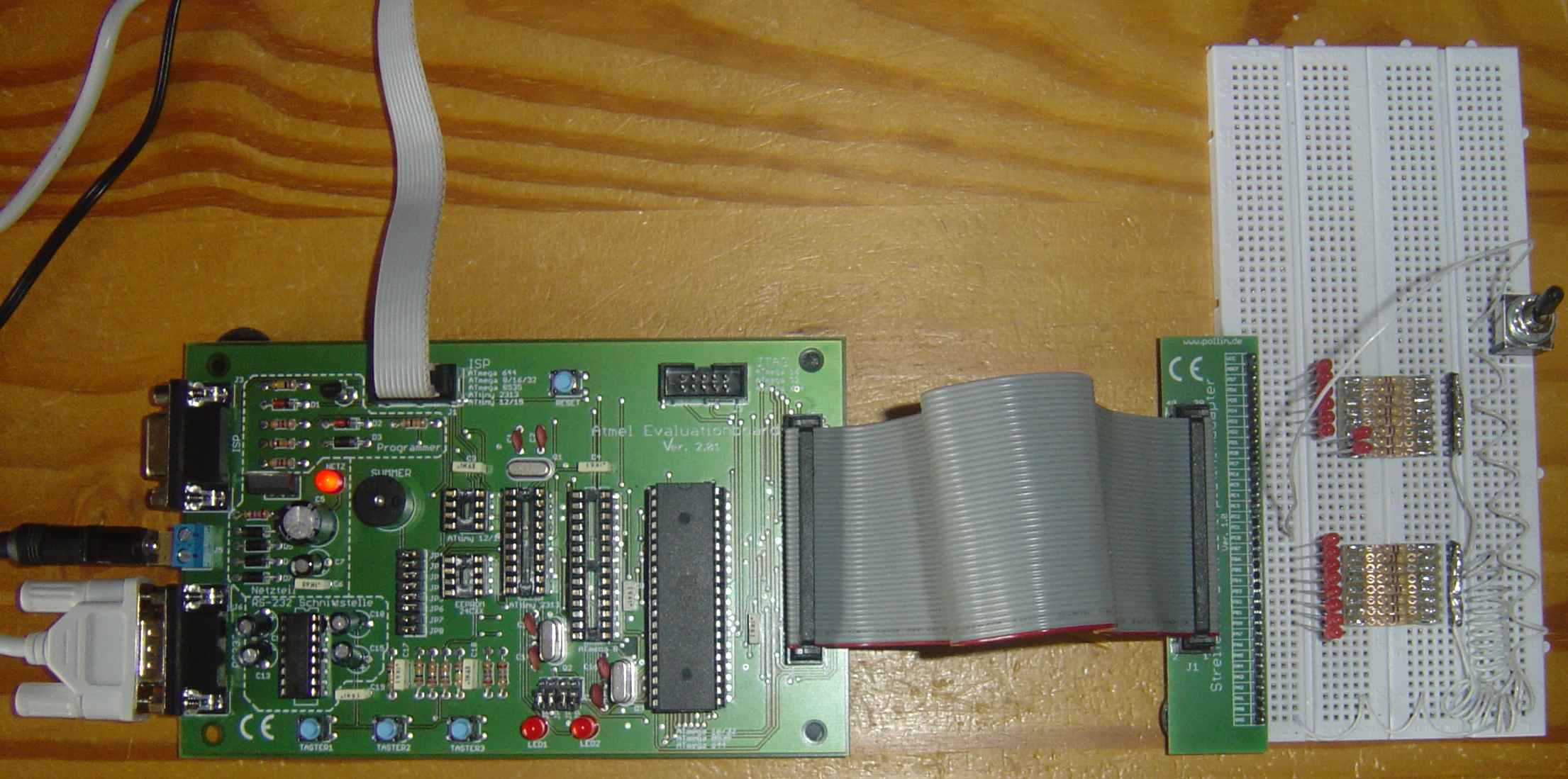
Hier mal ein Bild meines Testaufbaus für
Programmierprojekte, bestehend aus dem
Pollin-Evaluationsboard, einer Flachbandverbindung an einen 40poligen Adapter
und
dem Laborsteckbrett zum einfachen und schnellen Aufbauen von Testschaltungen:
Hier mal ein Bild des angeschlossenen/einsatzbereiten Atmel-Evaluationsboards
von Pollin
(bestückt mit einem µC von Atmel Typ ATMega32-16PU; der 40pin-Baustein links vom
Flachband):
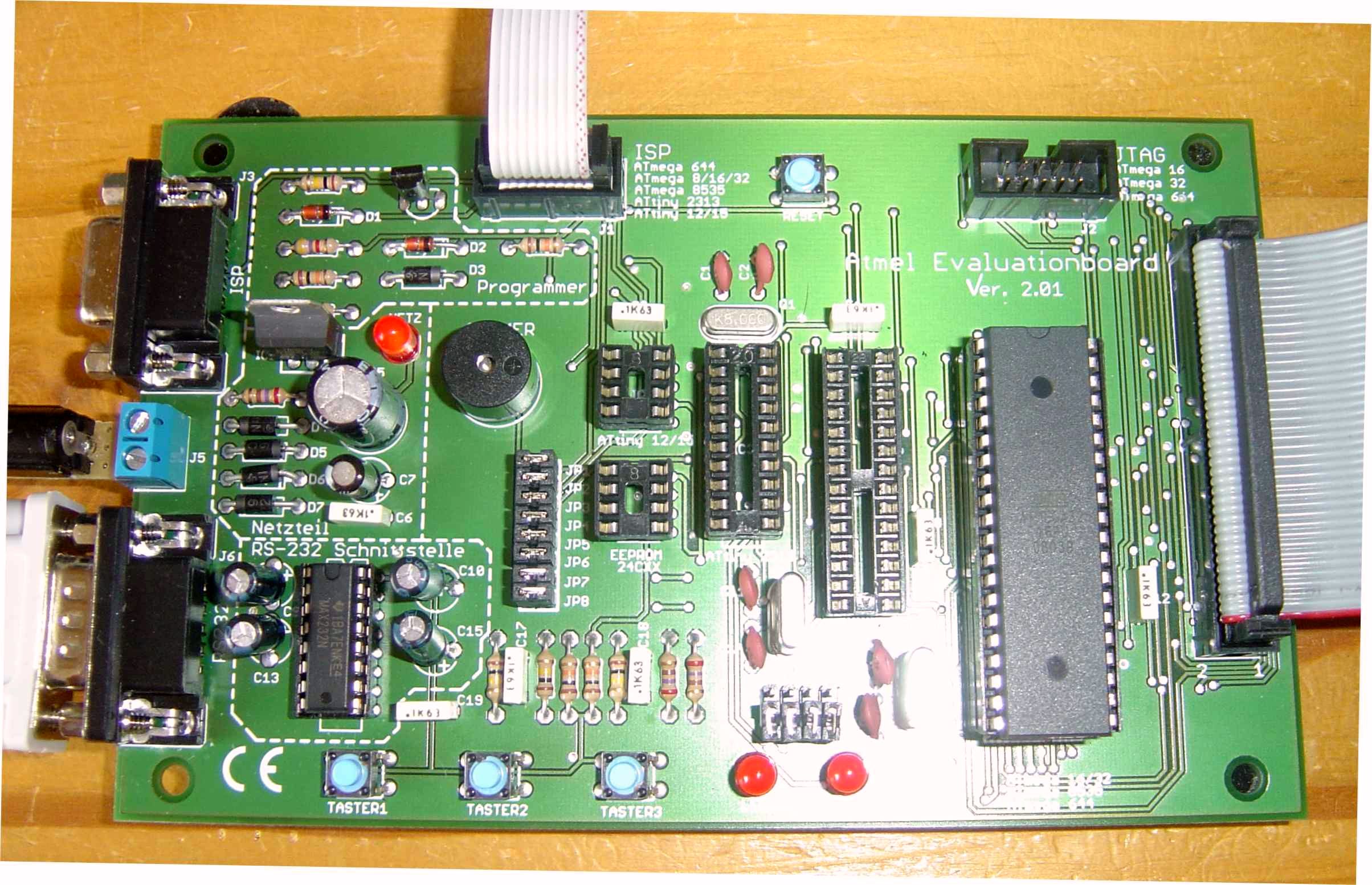
Links unten seht Ihr das 9pol-Serial-Kabel zur Kommunikation mit dem
MicroController bzw. dem darauf abgelegten Programm. Darüber befindet sich die
9V-Stromversorgung für das Board. Dann
seht Ihr den seriellen Anschluss für den integrierten ISP-Programmer des Boards
(welchen ich aber nicht nutze). Statt dessen nutze ich oben links den
Flachbandanschluß für einen externen ISP-Programmer. Rechts seht Ihr die
Möglichkeit einen JTAG-Programmer an das Board anzuschließen. Und rechts
schließlich das 40polige Flachbandkabel zur Verbindung an das
Laborsteckbrett/die
Experimentierplatine. Im Moment ist auf dem Board ein Microcontroller von Atmel
Typ ATMega32-16PU aufgesteckt (siehe links vom Flachbandleiter). Das Board ist universell
für verschiedene Atmel-MicroController nutzbar. Auf den leeren
Controller-Steckplätzen können z. B. auch ATMega8, ATTiny-Controller, usw.
programmiert werden. Des Weiteren befinden sich auf dem Board 3 Taster, 2 LEDs
und ein Summer, mit denen man experimentieren kann. Auf der Webseite der Fa. Pollin könnt Ihr Euch auch die
Anleitung für das Board runterladen. Dort sind die genauen technischen Daten des Boards
detailiert beschrieben.
Hier ein Bild des Laborsteckbretts, welches über
einen 40poligen Adapter mit dem
Pollin Evaluationsboard (Bild oben) verbunden ist:
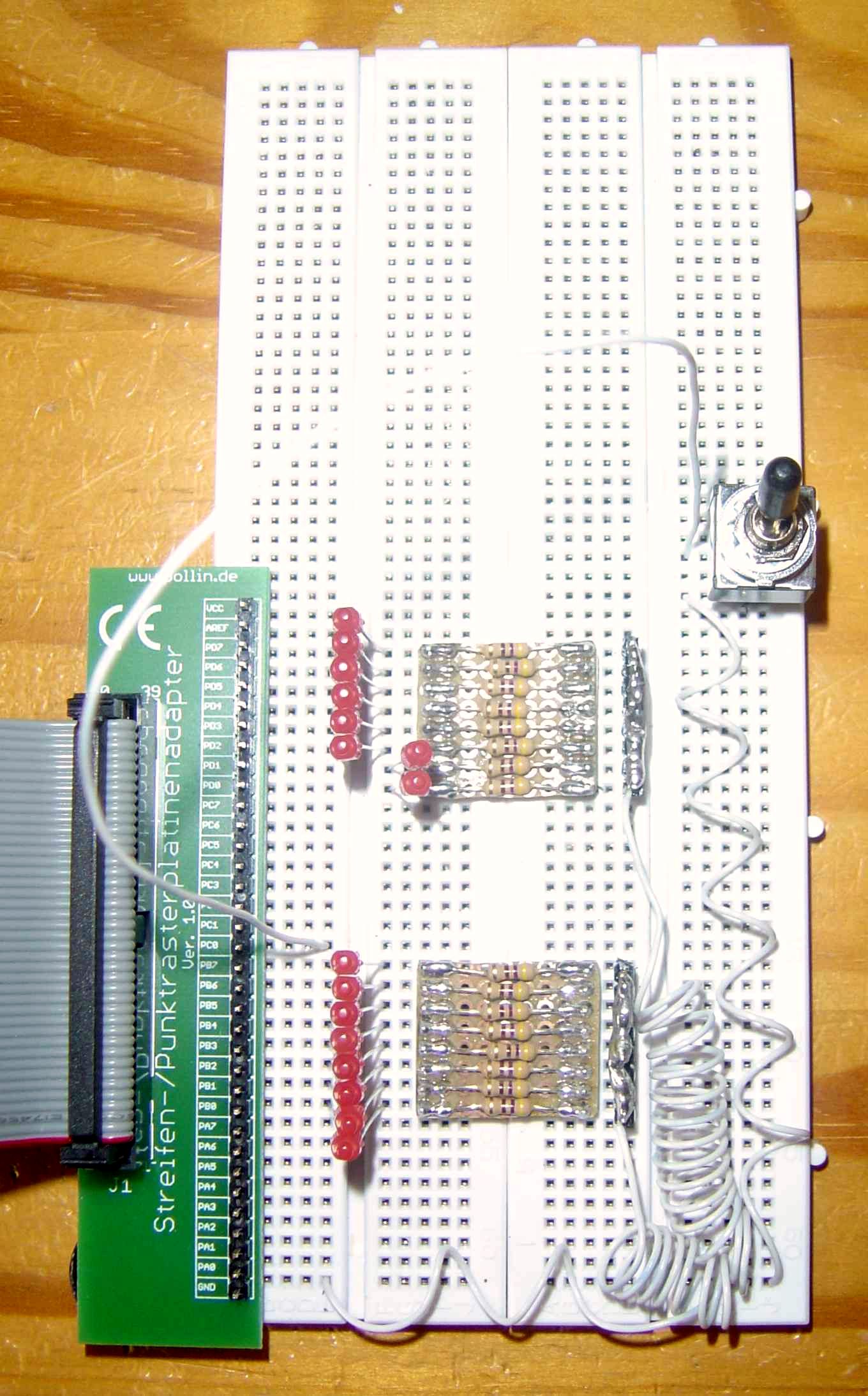
Auf dem Testboard habe ich mal LEDs und
entsprechende Vorwiderstände zur Anzeige der Ausgänge platziert und einen
Schalter um an einem Eingang einen Schaltzustand einzustellen. Für mein
folgendes einfaches Testprogramm benötigen wir zwar nur eine LED und einen
Vorwiderstand von ca. 300 Ohm, aber da ich vorhabe mich mit diesem Thema
intensiver auseinander zu setzen, habe ich das schon mal entsprechend
vorgesehen. Die LEDs sind an jeweils einen Pin angeschlossen und sind über einen
Vorwiderstand mit GND verbunden. Bevor ich Euch ein kleines Programm zum Einstieg/Test vorstelle, müssen wir
uns mal noch den MicroController, den ich im Folgenden benutzt habe (in diesem Fall einen Atmel ATMega32-16PU)
anschauen.
Hier mal die Pinbelegung des ATMega32-16PU
MicroControllers:
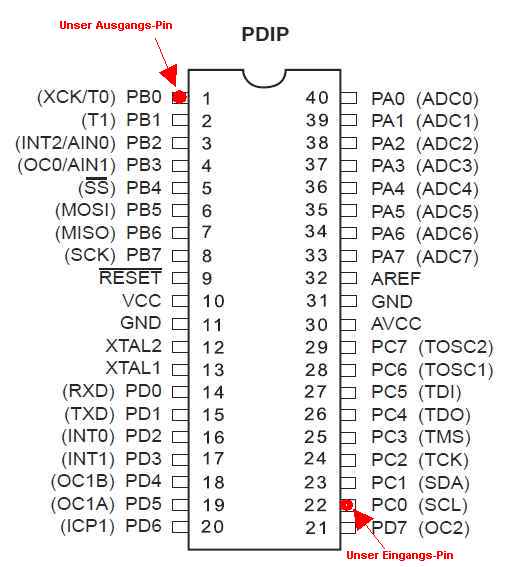
Wie man sehen kann, hat das Teil 40 Pins. Wenn man
hier nun die Versorgungspins bzw. festen Pins zum Betrieb des Controllers
abzieht, bleiben noch 32 Pins, die man relativ frei benutzen kann. Es sind die
Blöcke PA, PB, PC und PD mit jeweils Pin 1-8. D. h. Pin PA0-PA7, Pin PB0-PB7,
Pin PC0-PC7 und PD0-PD7. 4 x 8 Pins = 32 Pins zur Verwendung. Die Pins PD0 (RXD=Serieller
Empfang) und
PD1 (TXD=Serielle Sendung) werden hier für die Kommunikation mit der RS232 des Rechners benutzt. D. h.
es bleiben hier erstmal noch 30 Pins übrig. Je nach dem welche Pins man noch für
Datenverkehr mit anderen Devices benutzt (z. B. für einen I²C-Bus oder Anschluß
eines LCD-Displays) sind es entsprechend weniger Pins, die man dann frei
programmieren kann.
Die Pins PA0-PA7 können auch als analoge Eingangs-Pins genutzt werden. An diesen
Pins könnte auch eine Spannung von 0-5V angelegt werden. Der Controller würde
das dann in 1024 Einheiten á 0,0048828125 V (=10-Bit-Eingang) unterteilen.
Damit könnte man z. B. analoge Temperatursensoren über einen Widerstand im Sinne
eines Spannungsteilers abfragen. In diesem Bericht bleiben wir aber komplett in
der "digitalen Technik" und haben hier nur 2 Zustände der Pins (0V=Low=Aus;
5V=High=Ein). Womit wir eigentlich schon bei der Programmierung des Controllers
wären.
Im folgenden Beispiel möchte ich Euch einfach mal
zeigen, wie man über eine Rechner einen Befehl an einen MicroController schickt,
dieser dann irgendwas tut und eine Meldung an den Rechner zurück schickt. Ich
habe mir als Ausgangs-Pin zum Schalten einer LED den Pin 0 von Port B
(=PB0) ausgesucht. Als Pin für einen Schalteingang werden wir den Pin 0 von Port C
(PC0) nehmen. Beide Pins sind oben entsprechend rot markiert.
Hier nun mal ein kleines Testprogramm in BASCOM
um per PC einen Ausgang zu schalten und einen Eingangszustand abzufragen:
|
$regfile = "m32def.dat"
' Controllertyp ist ein ATMega32
$crystal = 16000000
' 16 MHz
Taktfrequenz (=16000000 Hz)
$hwstack = 100
' Reserviere Speicher für Hardwarestack
$swstack = 100
' Reserviere Speicher für Softwarestack
$framesize = 100
' Reserviere Speicher für Rahmengröße
$baud = 38400
' Datenübertragsgeschwindigkeit RS232 einstellen
Enable Interrupts
' Interrupts einschalten (für serielle Eingabe!)
Output_1 Alias Portb.0
' Pin 0 von Port B wird "Output_1" benannt
Config Output_1 = Output
' Output_1 wird als Ausgang definiert
Output_1 = 0
' Output_1 wird mit 0 vorbelegt = Low = 0V = LED AUS
Input_1 Alias Pinc.0
' Pin 0 von Port C wird "Input_1" benannt
Config Input_1 = Input
' Input_1 wird als Eingang definiert
Pinc.0 = 1
' Für Pin 0 von Port C den Pullup-Widerstand aktivieren
' RS232 einrichten: UART-Buffer; Einlesen erfolgt automatisch bei CHR(13)
' (=siehe Funktion des Unterprogramms Serial0charmatch())
Config Serialin = Buffered , Size = 50 , Bytematch
= 13
Dim Eingabe As String * 50
' Eingabevariable vor Gebrauch deklarieren
Declare Sub Serial0charmatch()
' Unterprogramm vor Gebrauch deklarieren/benennen
' Hauptschleife (Befehle zwischen "DO" und "LOOP" werden unendlich ausgeführt)
Do
If Eingabe <> "" Then
' Wenn Eingabestring nicht leer ist...
Eingabe = Ucase(Eingabe)
' Eingabe in Großbuchstaben
umwandeln = eindeutig
Select Case Eingabe
' Anhand des Eingabestrings ein Kommando ausführen
Case "1ON"
' Wenn der Befehl "Ausgang 1 einschalten" = 1ON war
Output_1 = 1
' setze den Ausgang Output_1 auf
High=5V=LED EIN
Print "Ausgang Nr.
1 hat den Zustand: " ; Output_1
' Meldung an RS232/PC
Case "1OFF"
' Wenn der Befehl "Ausgang 1
ausschalten" = 1OFF war
Output_1 = 0
' setze den Ausgang Output_1 auf Low=0V=LED AUS
Print "Ausgang Nr.
1 hat den Zustand: " ; Output_1
' Meldung an RS232/PC
Case "1INP"
' Wenn der Befehl "Eingang 1
abfragen" = 1INP war
Print "Eingang Nr. 1 hat den Zustand: " ; Input_1
' Meldung an RS232/PC
Case Else
' Wenn keine der o. g. Eingaben
zutrifft...
Print "Fehler:
unbekanntes Kommando"
' Meldung an RS232/PC
End Select
' Ende der "SELECT-CASE"-Überprüfung
Eingabe = ""
' Eingangsvariable vor nächstem Schleifenlauf leeren
End If
' Ende der "IF"-Bedingung
Loop
' Ende der Hauptschleife/Endlosschleife
End
' Theoretisches Programmende; wird nie erreicht!
' Unterprogramm/Prozedur
' Diese Prozedur wird automatisch ausgeführt, wenn ein CARRIAGE RETURN (CHR(13);
' ENTER) am Zeilenende empfangen wird. Dann wird die Variable "Eingabe" mit
' dem Inhalt der Eingabe gefüllt.
' (Siehe Initialisierung von UART-Buffer unter "Config Serialin...")
Sub Serial0charmatch()
' Unterprogramm-Name
Input Eingabe
' Schreibe Eingabestring
via RS232 in Variable "Eingabe"
End Sub
' Ende des Unterprogramms
|
O. g. Programm könnt Ihr Euch direkt aus dem Rahmen in die
Demoversion von BASCOM reinkopieren und damit "spielen" und
rumprobieren.
Kurze Erklärung zu o. g. Programm bzw. dessen
Funktion:
BASCOM-Befehle sind in schwarz geschrieben
' Kommentare zur Programmzeile in rot
Testaufbau auf dem Laborsteckbrett:
Ausgang:
Für die Anzeige des Ausgangs (Befehl ist "1ON" oder "1OFF")), wird eine LED
über eine Vorwiderstand zwischen Port B Pin 0 und GND angeschlossen. Achtung:
Bitte die Polung der LED berücksichtigen. Pluspol der LED an den Pin-Port
anschließen. (Sieht man an der LED meist an längerem Beinchen oder nicht
abgeflachte Seite der LED an.)
Eingang:
Für das Schalten des Eingangs (Befehl ist "1INP"), wird zwischen Port C Pin
0 und GND ein einfacher Schalter angeschlossen. Da mit dem Befehl Pinc.0=1 der
interne Pullup-Widerstand für den Eingang aktiviert wurde, brauchen wir hier
außer dem Schalter keine weiteren Bauteile (z. B. Pullup-/Pulldown-Widerstand),
deshalb gehe ich hier auch erstmal nicht weiter drauf ein.
Befehle:
Die Erklärung der einzelnen Befehle sind in rot als Kommentar hinter dem
eigentlichen Befehl zu sehen. Dort wird auch erläutert, was diese Programmzeile
genau macht.
Funktionsweise/Inbetriebnahme:
Nach dem Compilieren des Programmes und
Programmierung des Controllers über BASCOM, solltet Ihr eine Verbindung über die
RS232-Schnittstelle mit einem Terminal-Emulationsprogramm wie z. B."Hyperterm"
oder "PuTTY" aufbauen.
Die Parameter für den Verbindungsaufbau sind:
- Bits pro Sekunde: 38400
- Datenbits : 8
- Parität : keine
- Stoppbits : 1
- Flusssteuerung : keine
Nun könnt Ihr über das
Terminal-Emulationsprogramm Befehle an den Controller schicken und erhaltet dann
entsprechenden Rückmeldungen über dieses Fenster.
Folgende Befehle stehen zur Verfügung:
1ON = Schalte Ausgang1/LED ein
1OFF = Schalte Ausgang1/LED aus
1INP = Frage den Eingangszustand von Eingang1 ab; je nach Schalterstellung
des Eingangsschalters
Nach jedem Befehl wird eine entsprechende
Rückmeldung auf das Fenster der Terminal-Emulation ausgegeben.
Hier mal ein Snapshot aus PuTTY mit den einzelnen
Befehlen und den entsprechenden
Rückmeldungen
des µControllers über die RS232-Schnittstelle:
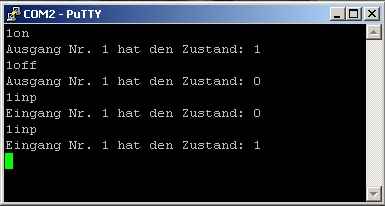
Hier kann man die Befehle und die Rückmeldungen wie
folgt sehen:
(Nach jedem Befehl wird die ENTER-Taste als Zeilenabschluss gedrückt)
Der Befehl "1on"
schaltet auf dem Steckbrett die LED ein und gibt dann die Meldung
"Ausgang Nr. 1 hat den Zustand: 1"
aus.
Der Befehl "1off"
schaltet auf dem Steckbrett die LED wieder aus und gibt dann die Meldung
"Ausgang Nr. 1 hat den Zustand: 0"
aus.
Der Befehl "1inp"
zeigt je nach Schalterzustand des Schalters auf dem Steckbrett den Zustand des Eingangs an.
Bei geschlossenem
Schalter wird
"Eingang Nr. 1 hat den Zustand: 0"
angezeigt, da ja über den Schalter der Eingangs-Pin auf Masse/GND gelegt
wird und damit keine 5V-Spannung mehr führt. Wenn nun der Schalter manuell
geöffnet wird führt der Eingangs-Pin wieder 5V. Wenn nun
der Befehl "1inp"
erneut eingegeben wird, gibt das Programm
dann die Meldung
"Eingang Nr. 1 hat den Zustand : 1"
aus. Über den im Programm intern aktivieren Pullup-Widerstand führt der
Eingangs-Pin
5V im Standard.
Nach Verbindung mit Masse/GND über den Schalter fließt der Strom gegen Masse ab
und der Pin hat wieder 0V.
Beim erneuten Öffnen des Schalters wird der Pin nicht mehr auf Masse/0V gelegt,
sondern über den intern aktivierten Pullup-Widerstand wieder auf 5V verbunden.
Gerade im Beispiel mit dem Eingang sieht man die Logik sehr deutlich, dass hier
nun ein geschlossener Schalter eigentlich 0V = AUS und ein geöffneter Schalter
5V = EIN bedeutet. Hier ist die Signallogik invertiert.
Zu=0 und Auf=1. Im Verhältnis dazu sieht man am Ausgang, dass Zu=5V=LED EIN und
Auf=0V=LED AUS bedeutet, was genau umgekehrt zur Eingangslogik ist.
Wenn man nun am Eingang den internen Pullup-Widerstand nicht gesetzt hätte und
auf dem Steckbrett einen Widerstand am Eingang auf Masse/GND gelegt hätte, hätte
man die gleiche Logik wie beim Ausgang erreicht. Allerdings benötigt man ein
Bauteil mehr. Die Thematik "PullUp"-, "PullDown"-Widerstand und auch die
Signalpegel "HIGH" und "LOW" möchte ich hier nicht im Detail behandeln, da das
Internet voll von Erklärungen diesbezüglich ist.
Hier ein mal paar Qellenlinks über Wikipedia bzgl. den wichtigen Schlagworten
für die AVR-Programmierung:
Generell gilt für uns aber in diesem einfachen Beispiel die folgende
Pegel-Logik:
0V = LOW-Signal = AUS; Ausgang=LED Aus; Eingang=Schalter geschlossen
5V = HIGH-Signal = EIN; Ausgang=LED Ein; Eingang=Schalter geöffnet
Mit der Demoversion von BASCOM könnt Ihr o. g.
Programm ausprobieren und damit "spielen", erweitern und anpassen. Ihr könnt auch das AVR-NET-IO-Board
nehmen, an einen Ausgang eine LED anschließen und auf den Controller über den
ISP-Stecker das Programm aufspielen. Auch das AVR-NET-IO-Board kann man
sicherlich als Testumgebung nehmen. Allerdings sind hier einige Ports vom
EXT-Stecker und dem Controller für den Netzwerkanschluss belegt. In der
Anleitung des Boards könnt Ihr aber sehen, welche Pins von welchen Ports noch
frei sind und dort z. B. eine LED anschließen und dieses Testprogramm nutzen.
Der nächste Schritt wäre hier nun ein schönes Programm zu basteln, mit dem man
bis zu 30 Pins schalten kann, und ein eigenes Platinenlayout für diesen
Controller zu basteln (ev. mit Ausgangsrelais oder Optokopplern zum Schalten von
Verbrauchern), sowie dann die Platine zu ätzen, zu bestücken und in Betrieb zu
nehmen. Über Programme wie z. B. Purebasic kann man dann leicht auf so einen
Controller zugreifen und eine Bedienoberfläche zum Schalten der Ausgänge und
Abfragen der Eingänge, etc. gestalten. Dies werden dann vielleicht auch mal
meine nächsten Schritte in dieser Sache sein. Auf jeden Fall hoffe ich, dass
mein kleines Beispiel reges Interesse findet und wünsche Euch viel Spaß bei
Nachbauen/Ausprobieren.
Da ich ebenfalls erst am Anfang
mit der BASCOM-Programmierung stehe,
habe ich hier z. Zt. keine komplexeren Programme zur Veröffentlichung.
Als genereller Einblick/Einstieg könnte dieses kleine Beispiel aber dem ein
oder anderen User vielleicht recht hilfreich sein und das Interesse wecken.
Wenn ich Eure Neugier geweckt habe, möchte ich Euch an dieser Stelle die
Webseite von
Gerold Penz (http://www.halvar.at)
unbedingt empfehlen.
Gerold bietet auf seiner Webseite einen kompletten Einsteigerkurs in BASCOM
(siehe
http://www.halvar.at/elektronik/kleiner_bascom_avr_kurs) an,
dessen Komplexität weit über mein o. g. Beispiel hinausgeht, ohne jedoch den
Leser
unnötig zu verwirren oder durch technisches Kauderwelsch zu entmutigen.
Er hat alles sehr einfach, verständlich und gut umsetzbar gehalten.
Auch die Beispiele von Gerold kann man leicht erweitern bzw. an
eigene Anforderungen anpassen und sind im Alltag vollkommen einsetzbar.
Durch Gerold habe ich hier einen sehr guten und einfachen Einstieg in die
BASCOM-Programmierung gefunden und möchte Ihm an dieser Stelle
ein herzliches "Dankeschön" für seine Arbeit und seine Mühe aussprechen.
Lieber Gerold: "Bitte weiter so!"
Bei Interesse,
Fragen, Wünsche, Anregungen, Lob oder Kritik könnt Ihr mir gerne eine
 eMail senden an: Oliver.Schlenker@T-Online.de
eMail senden an: Oliver.Schlenker@T-Online.de
|